Example 2
Example 2a: Fully Observed Particle
-
For this example, we use a simple network consisting of the Parent Node and the Child Node , which have a probabilistic relationship.
-
For Parameter Updating, we will add a fully observed particle, i.e., a particle that contains a value for both and .
-
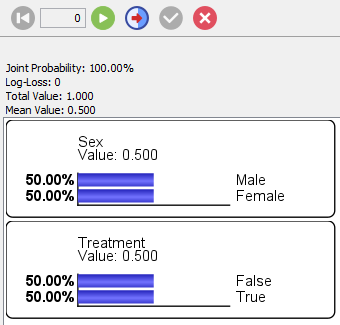
For a compact presentation, we show both nodes in Monitor Style, which means that, in Validation Mode, the distribution of the states is directly shown on the node.
Loading SVG... -
To start Parameter Updating, select
Main Menu > Inference > Parameter Updating. -
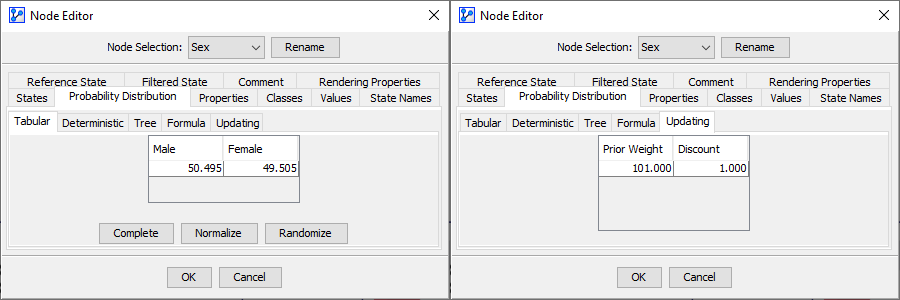
Next, we need to specify the Prior Weight. For our purposes, we select a value of 100.
-
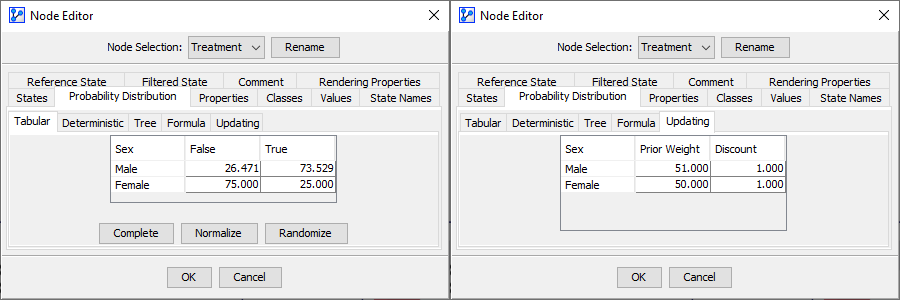
Choosing an overall Prior Weight of 100 specifies a Prior Weight of 100 for , and spreads this weight to , i.e., the Prior Weights are allocated based on the joint probability of each condition.
-
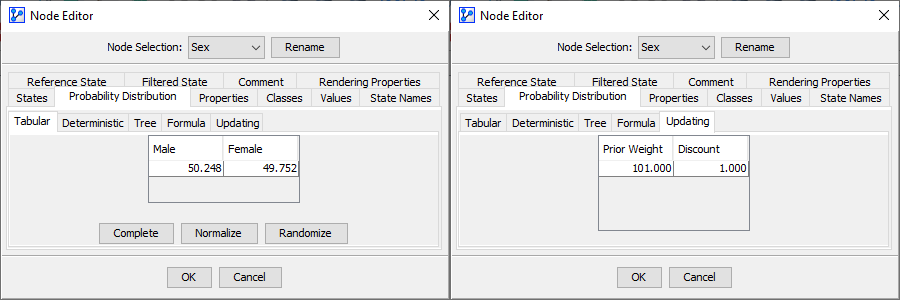
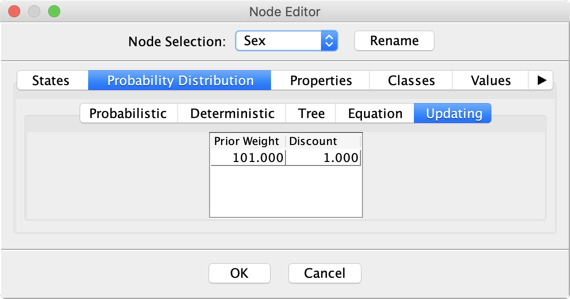
We can review the Prior Weights of each node by opening the Node Editor.
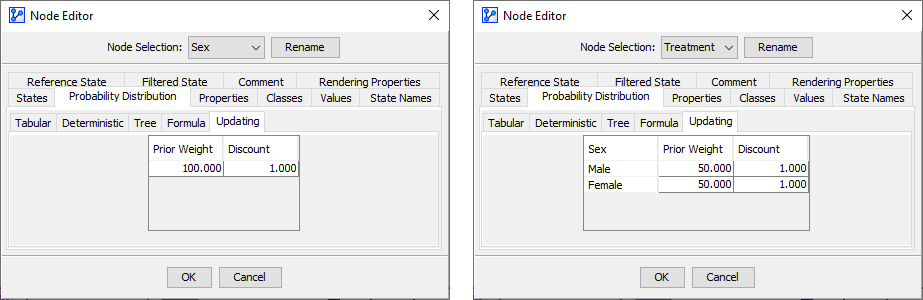
-
In the Node Editor, Prior Weights can also be edited.
-
Alternatively, you can assign Prior Weights by selecting
Node Context Menu > Properties > Prior Weights. In that case, the Prior Weight is distributed uniformly across all conditions. -
In the Node Editor, you can also edit Discounts.
-
You can also assign Discounts for a node by selecting
Node Context Menu > Properties > Discounts. In this context, the same Discounts are applied to all conditions.
Adding Particles
- We now take this network and perform Parameter Updating by adding particles one-by-one.
- The following screenshots focus on the relevant parts of the control panel in the Toolbar and the Monitor Panel.
Particle #1
-
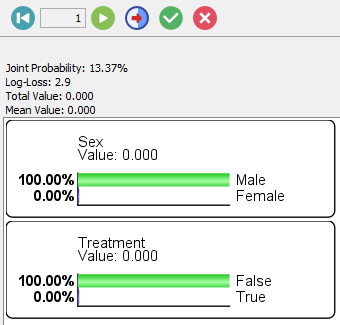
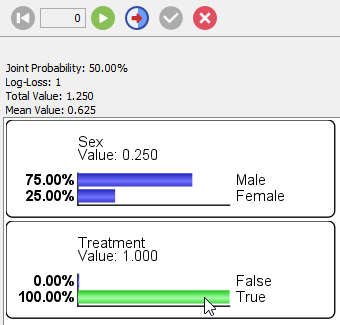
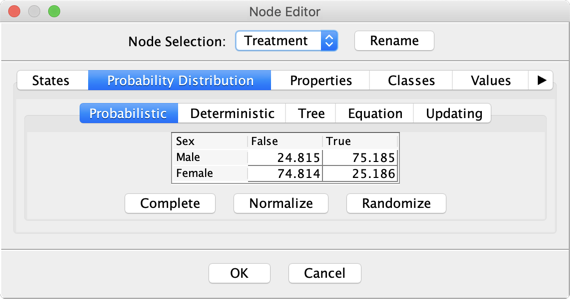
For the first particle, we set the evidence and .
-
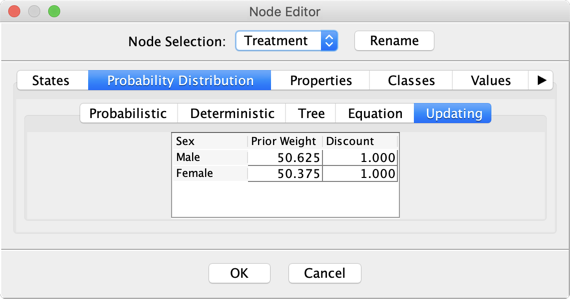
Upon validating the evidence we just set, we open the corresponding Node Editors to see the new probabilities and the new Prior Weight.
-
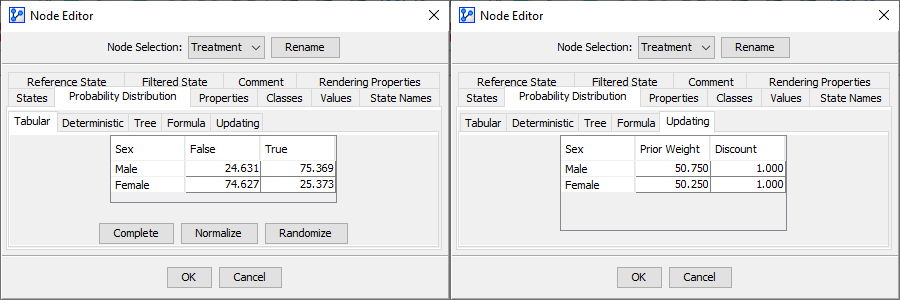
Note that for the node, only the condition was updated. The probabilities and the Prior Weight for remain unchanged.
-
Below is the result of the update after mixing our virtual particles with a particle corresponding to a male that did not take the treatment.
Loading SVG...
Example 2b: Partially-Observed Particle
-
In the following variation of the above example, we return to the original set of probabilities and a Prior Weight of 100.
Loading SVG... -
Now, however, we only apply a particle containing an observation for but not for .
-
Upon validating this incomplete particle, we can review the probability tables in the Node Editor:
-
As we can see, even though we do not know the state of the node , knowing changed the distribution of .
-
The new particle is split according to the posterior probability of .
-
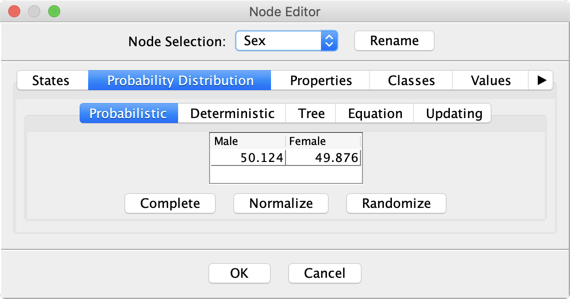
Note that the distribution of the node has been updated as well:
Example 2c: Partially-Observed Particle with Soft Evidence
- In a further variation of this example, we apply a partial observation with Soft Evidence.
- More specifically,
For example, we just see a pill box next to the person, which increases our belief that he/she has taken the treatment, say 75%.

This changes the posterior distribution of . The new particle will thus be split to take into account the uncertainty on both and .
Below is the result of the update after mixing our virtual particles with this particle. The entire table of has been updated.
Setting the Prior Weight to 0 allows indicating that you do not want to update the corresponding node.
Obviously, you need to have at least one node that has a Prior Weight greater than 0 for being able to use the Parameter Updating feature.